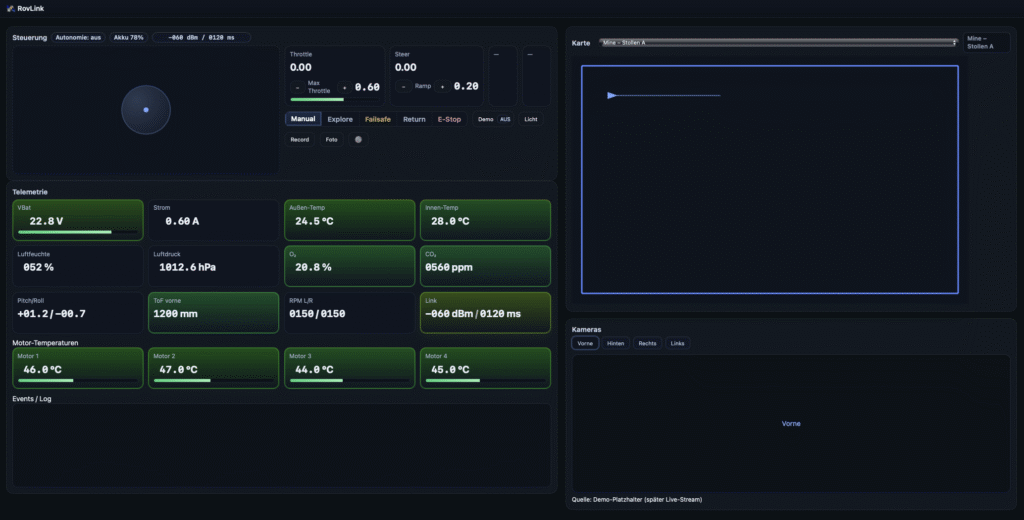
1. Überblick: Was RovLink alles kann
RovLink ist ein zentrales Dashboard für Rover und Roboter, das alle wichtigen Systeme, Sensoren und Steuerfunktionen in einer modernen, übersichtlichen Oberfläche vereint. Es dient als zentrale Steuerzentrale für manuelle Steuerung, autonome KI-Erkundung, Sensorüberwachung, Kartenvisualisierung und Simulation.
Alle relevanten Daten werden in Echtzeit dargestellt und können direkt angepasst werden. Das System ist vollständig responsiv aufgebaut und funktionierten auf einem Mac, Windows, Raspberry Pi 5 und kompakten Geräten wie der Clockwork uConsole.
Hauptfunktionen von RovLink
-
Manuelle Steuerung: Direkte Kontrolle des Rovers über Steuerfeld oder Gamepad.
-
Autonomie und KI: Intelligente Fahrmodi mit Hinderniserkennung und Rückkehrlogik.
-
Sensorik und Telemetrie: Echtzeitdaten aller Systeme, von Temperatur bis Spannung.
-
Demo-Modus: Simulation aller Sensoren, Steuerungen und KI-Entscheidungen ohne physische Hardware.
-
Live-Karte: Interaktive Umgebung mit Bewegungsverfolgung und Hinderniserkennung.
-
Einstellungen: Anpassung aller Parameter für Simulation, Sensorik und KI.
-
Event- und Log-System: Lückenlose Protokollierung aller Ereignisse und KI-Entscheidungen.
-
Technische Architektur: Modulare Struktur, vollständig lokal lauffähig.
Systemanforderungen
RovLink wurde speziell für den Raspberry Pi 5 entwickelt und läuft ebenso auf modernen Systemen mit macOS, Windows oder Linux.
Es benötigt keine Internetverbindung, da alle Funktionen vollständig offline im Browser ausgeführt werden. Ausgenommen ist hier die Nutzung von Online KI Systemen wie ChatGPT.
Technische Grundlage:
-
HTML, CSS, Vanilla JavaScript (ES Modules)
-
Lokaler Python-Webserver:
python3 -m http.server 8000
-
Empfohlene Browser: Firefox, Safari
-
Optimiert für: Raspberry Pi 5, MacBook, Clockwork uConsole, Später: ESP32 C3/C6, Raspberry Pi Pico 2 W
RovLink vereint alle wesentlichen Systeme eines Rovers in einer einzigen Anwendung.
Durch seine modulare Struktur, Echtzeitdarstellung und lokale Ausführung ist es sowohl für Entwickler, Forscher als auch Hobby-Ingenieure ideal geeignet.
2. Steuerung
Die Steuerung des Rovers erfolgt über das integrierte Steuerfeld von RovLink oder wahlweise über ein kompatibles Gamepad, wie den 8BitDo Pro 3.
Alle Bewegungs- und Eingabewerte werden in Echtzeit visualisiert, sodass der Benutzer jederzeit den genauen Zustand des Systems erkennt.
Die Oberfläche reagiert vollständig responsiv, wodurch die Steuerung sowohl auf Desktop- als auch auf mobilen Geräten präzise funktioniert.
Funktionen der Steuerung
-
Control-Stick-Anzeige: Zeigt die aktuelle Position des Joysticks in Echtzeit.
-
Throttle (Gas) in Prozent: Stufenlos steuerbar mit individuell einstellbarer maximaler Gasleistung.
-
Steer (Lenkung) in Prozent: Stufenlos steuerbar mit anpassbarer maximaler Lenkleistung.
-
Pitch und Roll: Darstellung der aktuellen Neigung des Rovers in Echtzeit.
-
Drehzahl (RPM): Anzeige der Drehzahlen beider Motoren.
-
Ramp und Beschleunigung: Einstellung, wie sanft der Rover auf Gasbefehle reagiert.
-
Not-Aus (E-Stop): Sofortige Deaktivierung aller Bewegungen.
-
Lichtsteuerung: Einschalten, Ausschalten oder automatisches Lichtsystem.
-
Video und Foto: Starten einer Videoaufnahme oder Erstellen eines Standbilds direkt aus der Oberfläche.
Benutzerfreundlichkeit und Bedienung
Die Benutzeroberfläche ist intuitiv aufgebaut. Alle Steuerungselemente sind logisch angeordnet und können sowohl mit der Maus als auch per Touch-Bedienung verwendet werden. Für maximale Flexibilität können Tastaturbefehle, Gamepad-Inputs oder Touch-Eingaben parallel genutzt werden.
RovLink erkennt verbundene Eingabegeräte automatisch und passt die Darstellung des Steuerfeldes an. So kann der Benutzer sofort zwischen manueller Steuerung und KI-Unterstützung wechseln, ohne die Oberfläche neu zu laden.
3. Autonomie-Modi
RovLink verfügt über mehrere intelligente Betriebsarten, die das Verhalten des Rovers an unterschiedliche Einsatzszenarien anpassen.
Jeder Modus besitzt eigene Routinen und kann manuell oder automatisch aktiviert werden. Dadurch lässt sich der Rover flexibel zwischen direkter Kontrolle und vollständiger Autonomie betreiben.
Verfügbare Modi
-
Manueller Modus:
Direkte Steuerung durch den Benutzer oder ein angeschlossenes Gamepad. Alle Bewegungen, Lichtbefehle und Kameraaktionen werden unmittelbar ausgeführt.
-
Explore-Modus:
Autonomer Fahrmodus, in dem der Rover seine Umgebung selbstständig erkundet. Er nutzt seine Sensoren, um Hindernisse zu erkennen, Kollisionen zu vermeiden und gleichzeitig eine Karte der Umgebung zu erstellen.
-
Return-Modus:
Autonomer Rückkehrmodus, in dem der Rover selbstständig zum Startpunkt oder zu einem definierten sicheren Ort zurückkehrt. Dieser Modus wird meist automatisch aktiviert, wenn ein niedriger Akkustand oder Signalverlust erkannt wird.
-
Failsafe-Modus:
Wird automatisch ausgelöst, wenn technische Probleme auftreten, zum Beispiel bei Überhitzung, Sensorfehlern oder Kommunikationsverlust. Der Rover stoppt, kühlt ab oder fährt kontrolliert in eine sichere Position zurück.
Verhalten und Logik
Alle Autonomie-Modi greifen auf eine Online KI wie ChatGPT oder die lokale KI von RovLink zu. Diese analysiert kontinuierlich Sensorwerte, Systemzustände und Bewegungsdaten, um situationsabhängige Entscheidungen zu treffen.
Wenn beispielsweise ein Hindernis erkannt wird, plant die KI automatisch eine alternative Route oder stoppt das Fahrzeug, bis der Weg wieder frei ist.
Der Wechsel zwischen den Modi kann jederzeit erfolgen. Der Benutzer kann den Rover manuell übernehmen oder der KI die vollständige Kontrolle überlassen. So bleibt RovLink flexibel einsetzbar, von präziser Handsteuerung bis hin zum vollautomatischen Betrieb.
4. Künstliche Intelligenz (KI-Anbindung)
RovLink verfügt über eine Verbindung zu ChatGPT oder eine integrierte lokale KI, die alle Sensordaten in Echtzeit überwacht und auf Veränderungen reagiert. Diese Komponente ist ein zentraler Bestandteil der autonomen und sicherheitsrelevanten Funktionen des Systems. Sie trifft selbstständig Entscheidungen, wenn der Rover im Autonomie- oder Failsafe-Modus aktiv ist, und kann auch im Demo-Modus vollständig simuliert werden.
Hauptfunktionen der KI
-
Permanente Sensordaten-Überwachung:
Analyse aller relevanten Werte wie Temperatur, CO₂, O₂, Motorlast, Spannung und Stromaufnahme.
-
Anomalie-Erkennung:
Frühzeitige Erkennung ungewöhnlicher oder kritischer Werte mit sofortiger Warnung an den Benutzer.
-
Eigenständiges Handeln:
Automatisches Stoppen, Zurückziehen oder Warten bei drohenden Gefahren oder Systemfehlern.
-
Live-Logs:
Alle Entscheidungen, Warnungen und Aktionen der KI werden im Log-System dokumentiert und im Interface angezeigt.
-
Kommunikationsverlust-Erkennung:
Bei Signalabbrüchen erkennt die KI den Zustand automatisch und aktiviert den Rückkehrmodus, um eine sichere Verbindung wiederherzustellen.
Arbeitsweise
Die KI kann bei Bedarf lokal innerhalb von RovLink arbeiteten und läuft auf dem Raspberry Pi 5. Dadurch ist RovLink unabhängig von einer Internetverbindung und kann auch in abgeschotteten Umgebungen wie Tunneln, Minen oder Laboren betrieben werden.
Alle Entscheidungen basieren auf Schwellenwerten, die der Benutzer selbst festlegen kann. So lässt sich definieren, ab welchen Temperaturen, Spannungen oder Gaswerten Warnungen ausgelöst oder Maßnahmen eingeleitet werden.
Die KI greift kontinuierlich auf die interne State-Engine zu, die sämtliche Sensordaten, Systemzustände und Motorparameter verwaltet. Sobald ein kritischer Wert erreicht wird, erstellt die KI ein Event, das im Log erscheint und gleichzeitig eine Aktion auslöst, beispielsweise das Aktivieren des Failsafe-Modus oder eine Warnmeldung im Dashboard.
RovLink nutzt seine künstliche Intelligenz nicht nur zur Absicherung, sondern auch zur Verbesserung der autonomen Navigation. Während einer Erkundungsfahrt lernt die KI, typische Muster zu erkennen, etwa wie der Rover auf bestimmte Geländetypen reagiert oder wie schnell sich Sensorwerte verändern. Diese Informationen können später genutzt werden, um die Steuerungslogik weiter zu optimieren.
RovLinks KI sorgt dafür, dass das System selbstständig, sicher und effizient arbeitet, ganz gleich, ob es um Navigation, Stabilität oder Fehlererkennung geht.
5. Demo-Modus
Der Demo-Modus ist das Herzstück von RovLink. Er ermöglicht es, sämtliche Funktionen des Systems zu testen, zu erleben und zu verstehen, ohne dass ein physischer Rover vorhanden oder verbunden sein muss.
Alle Abläufe werden in Echtzeit simuliert, sodass das Verhalten des Rovers unter realistischen Bedingungen beobachtet werden kann.

Ziel und Zweck
Der Demo-Modus wurde entwickelt, um die Entwicklung, das Testen und das Verständnis der Steuerungslogik zu ermöglichen.
Er bietet eine sichere, vollständig simulierte Umgebung, die ideal ist für:
-
das Testen der Steuerung und des Fahrverhaltens,
-
die Simulation von Sensorwerten wie Temperatur, Stromverbrauch, Luftfeuchtigkeit und Gaswerten,
-
die Überprüfung der KI-Reaktionen bei kritischen Situationen,
-
das Erproben der autonomen Funktionen wie Explore- und Return-Modus,
-
das Validieren von Fehlern, Sicherheitsroutinen und Failsafes.
Damit ist der Demo-Modus nicht nur ein Präsentationswerkzeug, sondern auch eine Trainings- und Entwicklungsumgebung für Entwickler, Tester und Anwender, die das System verstehen wollen, ohne Risiken einzugehen.
Ablauf der Simulation
Sobald der Demo-Modus aktiviert wird, erzeugt RovLink eine virtuelle Umgebung, die alle Komponenten eines echten Rovers simuliert.
Dabei laufen interne Algorithmen, die Sensordaten, Motorverhalten und physikalische Eigenschaften nachbilden.
Typischer Ablauf:
-
Der Benutzer definiert einen Startzustand, etwa Akkustand, Motortemperatur oder Umgebungstemperatur.
-
Eine Bewegung wird simuliert, entweder manuell über das Steuerfeld oder autonom über den Explore-Modus.
-
Der Rover „fährt“ virtuell über die Karte, wobei seine aktuelle Position und der Pfad in Echtzeit eingezeichnet werden.
-
Telemetriedaten verändern sich dynamisch: Motortemperatur steigt, Batterie entlädt sich, Umgebungstemperatur schwankt.
-
Die KI überwacht permanent alle simulierten Werte und reagiert auf Abweichungen oder Fehler.
Interaktion mit der Simulation
Im Demo-Modus kann der Benutzer jederzeit zwischen den verschiedenen Betriebsarten umschalten:
-
Manuell: Steuerung über das Steuerfeld oder ein Gamepad.
-
Explore: Autonomer Betrieb, bei dem RovLink die Umgebung selbstständig erkundet.
-
Return: Der Rover kehrt automatisch zum Startpunkt zurück.
-
Failsafe: Wird ausgelöst, wenn Probleme erkannt werden, etwa Überhitzung oder niedriger Akkustand.
Die Simulation ist vollständig interaktiv.
Bewegungen am virtuellen Joystick führen unmittelbar zu Reaktionen auf der Karte, Licht und Kamerafunktionen lassen sich aktivieren, und sämtliche Aktionen werden realistisch dargestellt, um das Verhalten eines echten Rovers so genau wie möglich nachzubilden.
Simulation der Sensoren
Im Demo-Modus werden alle Sensordaten dynamisch generiert, als stammten sie von echter Hardware.
Dazu gehören:
-
Batteriestand in Prozent und Spannung in Volt
-
Stromaufnahme der Motoren
-
Motortemperaturen
-
Gehäuse-Innentemperatur
-
Außentemperatur, Luftfeuchtigkeit und Luftdruck
-
CO₂- und O₂-Werte
-
Pitch und Roll (Neigungswinkel)
-
Entfernungssensor zur Hinderniserkennung
Alle Werte werden kontinuierlich aktualisiert und farblich visualisiert.
Steigen Werte in den kritischen Bereich, färben sich die Anzeigen automatisch gelb, orange oder rot, bei Alarmzuständen blinkend.
Reaktion der KI im Demo-Modus
Die KI-Simulation ist einer der wichtigsten Bestandteile des Demo-Modus. Sie analysiert in Echtzeit die Telemetriedaten und reagiert auf festgelegte Schwellenwerte.
Beispiele für Reaktionen:
-
Steigt die Motortemperatur zu stark, stoppt die KI den Rover und gibt eine Warnung aus.
-
Sinkt die Batteriespannung unter den definierten Wert, aktiviert RovLink automatisch den Return- oder Failsafe-Modus.
-
Wird eine hohe CO₂-Konzentration erkannt, gibt die KI eine Sicherheitswarnung aus.
-
Bleibt der Rover über längere Zeit unbeweglich, interpretiert die KI dies als festgefahrene Situation und löst eine Rückwärtsbewegung oder Richtungsänderung aus.
Alle Entscheidungen und Aktionen werden im Log-System dokumentiert, einschließlich der Begründungen, damit das Verhalten jederzeit nachvollzogen werden kann.
Karten und Umgebungen
RovLink enthält mehrere vordefinierte Szenarien, um das Verhalten des Rovers in unterschiedlichen Umgebungen zu testen.
Verfügbare Karten:
-
Mine A – klassischer Stollen mit mehreren Abzweigungen
-
Mine B – weit verzweigte Kaverne
-
Mine C – Schacht mit Querstollen
-
Cave Narrow – enger, labyrinthartiger Gang
-
Testgelände – rechteckiges Areal für Bewegungs- und KI-Tests
-
Outdoor – unebenes Gelände mit Hindernissen und Geröll
Während der Simulation wird der Pfad des Rovers live auf der Karte aufgezeichnet.
Der Startpunkt wird markiert, die aktuelle Position bewegt sich dynamisch, und der gefahrene Weg bleibt sichtbar.
Ereignis- und KI-Protokolle
Alle Aktionen, Warnungen und Systemmeldungen werden in Echtzeit im Event-Log festgehalten.
Der Benutzer kann zwischen zwei Ansichten umschalten:
-
System-Logs: Zeigen technische Meldungen, Statusänderungen und Steuerbefehle.
-
KI-Ausgaben: Dokumentieren Entscheidungen und Warnungen der künstlichen Intelligenz.
Die neuesten Einträge erscheinen am unteren Rand des Log-Fensters und ergeben einen chronologischen, nachvollziehbaren Ablauf der Simulation.
Bedeutung und Nutzen
Der Demo-Modus ist weit mehr als eine Demonstrationsfunktion. Er ist ein zentrales Werkzeug für Entwicklung, Forschung, Präsentationen und Fehlertests. Er ermöglicht es, Verhalten und Sicherheit zu prüfen, bevor reale Hardware eingesetzt wird, und spart dadurch Zeit, Kosten und potenzielle Risiken.
Darüber hinaus eignet sich der Modus hervorragend für Schulungen und Analysen, um zu zeigen, wie RovLink in realen Situationen reagiert. Der Demo-Modus bildet die Grundlage für jedes Entwicklungsprojekt in RovLink. Er schafft eine sichere Umgebung, in der alle Systeme, Algorithmen und Interaktionen getestet werden können, bevor der Rover tatsächlich gebaut oder gestartet wird.
6. Einstellungen
Im Einstellungsbereich von RovLink lassen sich alle relevanten Parameter für Simulation, Steuerung, Sensorik und KI individuell anpassen. Dieser Bereich bildet das Fundament für die Feinabstimmung des gesamten Systems und ermöglicht es, das Verhalten des Rovers exakt auf den jeweiligen Einsatz abzustimmen.
Einstellbare Parameter
Der Benutzer kann in RovLink zahlreiche Werte und Bedingungen festlegen, um realistische oder gezielt herausfordernde Szenarien zu erzeugen. Dazu gehören unter anderem:
-
Startbedingungen: Festlegung von Akku-Ladung, Motortemperatur, Umgebungstemperatur und Startposition.
-
Grenzwerte und Schwellen: Definition von maximalen Temperaturen, Spannungsbereichen oder Grenzwerten für CO₂, O₂ und Stromaufnahme.
-
Demo- und KI-Parameter: Steuerung der Sensordynamik, der Reaktionsgeschwindigkeit der KI und der Intensität von Warnmeldungen.
-
System-Resets: Möglichkeit zum Löschen von Telemetrie-Daten, Rücksetzen der Simulation oder Wiederherstellen der Standardkonfiguration.
-
Visuelle Einstellungen: Auswahl zwischen verschiedenen Anzeige-Modi, Farbthemen und Einheitensystemen (metrisch oder imperial).
Benutzerfreundlichkeit
Die Oberfläche ist so aufgebaut, dass alle Einstellungsbereiche übersichtlich in Kategorien gegliedert sind. Änderungen werden sofort übernommen, ohne dass ein Neustart erforderlich ist.
Dank des responsiven Designs funktioniert die Anpassung der Parameter auf großen Monitoren ebenso komfortabel wie auf kleineren Geräten, etwa der Clockwork uConsole.
Sicherheit und Kontrolle
RovLink zeigt bei allen sicherheitsrelevanten Änderungen eine Bestätigung an, um unbeabsichtigte Modifikationen zu verhindern.
Die Einstellungsfunktionen machen RovLink zu einem hochgradig flexiblen Werkzeug, das sich sowohl für einfache Simulationen als auch für komplexe Forschungs- und Entwicklungsprojekte präzise konfigurieren lässt.
7. Live-Karte
Die Live-Karte ist eines der zentralen visuellen Elemente von RovLink. Sie zeigt den aktuellen Standort des Rovers, seinen zurückgelegten Weg und alle relevanten Umgebungsdaten in Echtzeit an.
Die Karte dient sowohl der Navigation im Betrieb als auch der Visualisierung während der Simulation im Demo-Modus.
Funktionen der Karte
Automatische Kartierung:
Im Explore-Modus erstellt der Rover selbstständig eine Karte seiner Umgebung. Hindernisse, Wände und Geländestrukturen werden automatisch erkannt und eingetragen.
Bewegungstracking:
Während der Fahrt wird der Pfad des Rovers in Echtzeit auf der Karte eingezeichnet. Dies ermöglicht eine präzise Nachverfolgung der Route und hilft bei der Analyse des Navigationsverhaltens.
Auswahl vordefinierter Karten:
RovLink enthält mehrere Szenarien, die für Simulationen und Tests genutzt werden können, darunter:
-
Mine A
-
Mine B
-
Mine C
-
Cave Narrow
-
Outdoor
-
Testgelände
Start- und Rover-Markierungen:
Der Startpunkt wird durch einen blauen Pfeil markiert, während die aktuelle Position des Rovers durch einen grünen Pfeil dargestellt wird. Diese Markierungen werden bei jeder Bewegung aktualisiert, sodass jederzeit klar erkennbar ist, wo sich der Rover befindet.
Kollisions-Erkennung:
Hindernisse und Wände werden auf der Karte hervorgehoben. Im Explore- oder Demo-Modus werden erkannte Kollisionen simuliert und visuell dargestellt, um das Verhalten des Rovers unter realistischen Bedingungen zu demonstrieren.
Darstellung und Technik
Dynamische Elemente, etwa der Rover, Pfade und Sensordaten werden fortlaufend aktualisiert. Auf kleineren Displays passt sich die Kartendarstellung automatisch an, damit wichtige Informationen jederzeit sichtbar bleiben.
Erweiterbarkeit
Die Kartenfunktionen von RovLink sind modular aufgebaut.
In zukünftigen Versionen sollen zusätzliche Funktionen integriert werden, darunter:
-
Unterstützung eigener Karten und benutzerdefinierter Szenarien
-
Verknüpfung mit realen GPS-Koordinaten
-
Darstellung von Höhenprofilen und 3D-Ansichten
Die Live-Karte ist damit nicht nur ein Anzeigeinstrument, sondern auch ein leistungsfähiges Werkzeug für Analyse, Navigation und Simulation in Echtzeit.
8. Kamerasystem
RovLink ist für den Anschluss und die Verwaltung mehrerer Kameras vorbereitet. Das Kamerasystem ermöglicht es, Live-Bilder direkt im Dashboard anzuzeigen und bietet damit einen umfassenden Überblick über die Umgebung des Rovers.
Es wurde so konzipiert, dass sich bis zu vier Kameras gleichzeitig integrieren lassen, die wahlweise in der Benutzeroberfläche angezeigt oder einzeln ausgewählt werden können.
Geplante Ansichten
-
Frontkamera: Zeigt den Bereich vor dem Rover, ideal für Navigation und Hinderniserkennung.
-
Heckkamera: Unterstützt beim Rückwärtsfahren und bei der Überwachung des hinteren Bereichs.
-
Seitkamera links: Überwachung der linken Fahrzeugseite, nützlich bei engen Passagen oder um Objekte und Wände im Blick zu behalten.
-
Seitkamera rechts: Darstellung der rechten Fahrzeugseite.
Bedienung und Darstellung
Die Kameras lassen sich über einfache Schaltflächen aktivieren oder wechseln. Das Live-Bild wird im unteren Bereich der Karte angezeigt und aktualisiert sich in Echtzeit. Die Benutzeroberfläche ist so gestaltet, dass sie auch auf kleineren Displays, etwa auf einem Raspberry Pi mit Touchscreen oder der Clockwork uConsole, gut bedienbar bleibt.
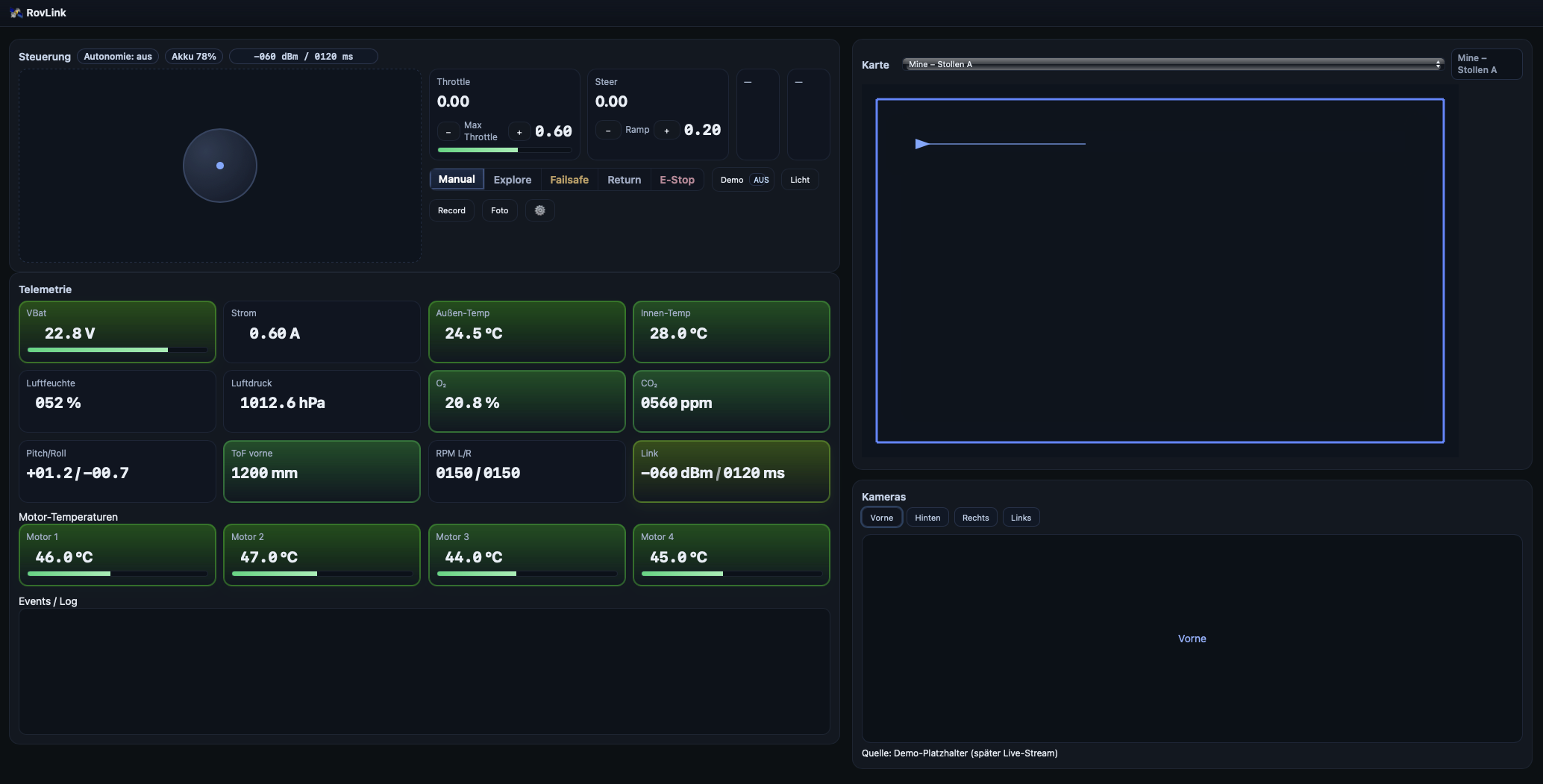
9. Telemetrie und Sensorik
RovLink zeigt alle wichtigen Messwerte und Systemdaten des Rovers in Echtzeit an. Diese Daten sind in übersichtliche Kategorien unterteilt und werden farblich hervorgehoben, um kritische Zustände sofort sichtbar zu machen.
Die Telemetrie bildet das zentrale Informationszentrum des Dashboards und ist eng mit der KI und dem Event-System verknüpft.
Kategorien und Sensoren
RovLink verarbeitet und visualisiert Daten aus allen wichtigen Systembereichen.
Dazu gehören:
-
Energie: Anzeige von Akku-Prozent, Batteriespannung und Stromaufnahme.
-
Motoren: Temperatur jedes Motors, Drehzahl (RPM) und Status der Motorsteuerung.
-
Umgebung außen: Temperatur, Luftfeuchtigkeit, Luftdruck sowie Konzentration von CO₂ (in ppm) und O₂ (in Prozent).
-
Innenraum: Elektronik- und Gehäusetemperatur zur Überwachung der Systemstabilität.
-
Lage und Bewegung: Pitch und Roll, um die Neigung und Schräglage des Rovers darzustellen.
-
Entfernungssensor: Simulation und Anzeige der gemessenen Distanz zu Hindernissen über den ToF-Sensor im Frontbereich.
Visualisierung der Daten
Alle Werte werden kontinuierlich aktualisiert und farblich abgestuft dargestellt.
Die Farbverläufe kennzeichnen den Zustand jedes Parameters:
-
Grün: Normalbereich
-
Gelb: Erhöhter Wert, Beobachtung empfohlen
-
Orange: Kritischer Bereich
-
Rot: Alarm oder blinkend: Notfallzustand
Diese Farblogik erlaubt eine schnelle visuelle Einschätzung des Systemzustands, ohne einzelne Werte im Detail prüfen zu müssen.
Datenverarbeitung und Anzeige
RovLink aktualisiert die Telemetrie mit hoher Frequenz, sodass jede Änderung der Sensorwerte nahezu verzögerungsfrei dargestellt wird. Alle Anzeigen sind responsiv gestaltet und passen sich automatisch an die Bildschirmgröße an.
Damit bleibt die Telemetrie sowohl auf großen Monitoren als auch auf kleineren Geräten vollständig bedienbar und lesbar.
Erweiterte Funktionen
-
Datenexport: Zukünftig sollen Telemetrie- und Sensordaten exportiert werden können, beispielsweise als CSV- oder JSON-Dateien zur weiteren Analyse.
-
Datenlogging: In Verbindung mit dem Event-System können Sensordaten dauerhaft gespeichert und für Simulationen, Fehlertests oder Forschungszwecke ausgewertet werden.
-
Benutzerdefinierte Schwellenwerte: Jeder Sensorwert kann individuell konfiguriert werden. So lässt sich genau festlegen, ab welchen Werten Warnmeldungen oder KI-Aktionen ausgelöst werden.
10. Event- und Log-System
Das Event- und Log-System in RovLink dokumentiert sämtliche Ereignisse, Aktionen und Entscheidungen des Systems in Echtzeit. Es sorgt für vollständige Transparenz während der Steuerung, Simulation oder im autonomen Betrieb. Jede Aktivität, ob manuell ausgelöst oder durch die KI entschieden, wird chronologisch erfasst und kann jederzeit eingesehen werden.
Aufbau des Log-Systems
Das System ist in zwei Hauptbereiche unterteilt:
-
Events und Logs: Enthalten alle Systemmeldungen, Statusänderungen, Fahrdaten und technische Ereignisse. Hier erscheinen zum Beispiel Informationen über Bewegungsbefehle, Änderungen an der Energieversorgung oder Sensorwarnungen.
-
AI Infos: Zeigen die spezifischen Mitteilungen der künstlichen Intelligenz, darunter Warnungen, Entscheidungen und Handlungsbegründungen. Dieser Bereich erlaubt eine detaillierte Nachverfolgung der KI-Logik und dient der Analyse von Autonomie-Verhalten und Fehlersituationen.
Die neuesten Einträge werden stets am unteren Rand des Log-Fensters angezeigt. Dadurch entsteht ein klarer, terminalähnlicher Verlauf, der alle Systemereignisse in zeitlicher Reihenfolge abbildet.
Funktionen
-
Echtzeitprotokollierung: Alle Ereignisse werden ohne Verzögerung erfasst und im Interface angezeigt.
-
Speicherfunktion (geplant): Zukünftig wird es möglich sein, Logdaten lokal auf dem Raspberry Pi oder im Browser zu speichern. Dadurch lassen sich längere Simulationen oder reale Rover-Einsätze dokumentieren und später auswerten.
-
Synchronisation mit Telemetrie (geplant): Ereignisse werden automatisch mit Telemetriedaten verknüpft. Dadurch kann der genaue Zustand des Systems zum Zeitpunkt eines Ereignisses nachvollzogen werden.
-
Visuelle Hervorhebungen: Wichtige oder kritische Einträge werden farblich markiert, damit sie sofort ins Auge fallen.
Nutzen
Das Event- und Log-System ist ein unverzichtbares Werkzeug für Entwickler, Tester und Operatoren. Es erlaubt die Analyse des Systemverhaltens im Detail und bildet die Grundlage für Fehlersuche, Optimierung und Forschung. Alle Entscheidungen, Sensormeldungen und KI-Reaktionen sind nachvollziehbar dokumentiert, was RovLink zu einem transparenten und überprüfbaren Steuerungssystem macht.
11. Technische Basis
RovLink wurde mit Fokus auf Stabilität, Leistung und Kompatibilität entwickelt. Die Software ist vollständig in HTML, CSS und Vanilla JavaScript (ES Modules) geschrieben und benötigt keine zusätzlichen Frameworks oder Internetverbindungen.
Durch diesen modularen Aufbau kann RovLink auf Systeme wie den Raspberry Pi 5 bis hin zu Desktop- oder Laptop-Systemen ausgeführt werden.
Architektur und Ausführung
RovLink läuft direkt im Browser und nutzt einen lokalen Webserver als Backend. Für den Start genügt ein einfacher Python-Befehl:
python3 -m http.server 8000
Nach dem Start kann das Dashboard über die lokale Adresse http://localhost:8000 geöffnet werden.
Unterstützte Systeme
RovLink ist kompatibel mit:
-
Raspberry Pi 5 (optimierte Referenzplattform)
-
macOS, Windows und Linux
-
Clockwork uConsole
-
(geplant) ESP32 C3/C6
-
(geplant) Raspberry Pi Pico 2 W
Durch den ressourcenschonenden Aufbau läuft RovLink auch auf Geräten mit begrenzter Leistung stabil. Das Dashboard reagiert flüssig und bleibt selbst bei hoher Telemetrie-Aktivität oder intensiver Simulation performant.
Browser-Kompatibilität
RovLink unterstützt aktuell folgende Browser:
-
Mozilla Firefox
-
Safari
Die Benutzeroberfläche ist vollständig responsiv, sodass sich alle Elemente dynamisch an die Bildschirmgröße anpassen.
Dies ermöglicht eine komfortable Nutzung sowohl auf großen Monitoren als auch auf kleinen Displays oder mobilen Geräten.
Optimierungen und Zielsystem
RovLink ist speziell auf den Raspberry Pi 5 optimiert. Die Simulation und das Echtzeit-Rendering nutzen die GPU-Beschleunigung des Systems, um Bewegungen, Karten und Sensorwerte effizient darzustellen.
Auch die Datenverarbeitung der KI läuft lokal auf dem Pi, sodass Entscheidungen unmittelbar erfolgen können, ohne Verzögerung durch externe Rechenprozesse.
12. Ausblick auf die Entwicklung von RovLink
RovLink befindet sich in einer aktiven Entwicklungsphase. Die aktuelle Version bildet ein stabiles Fundament, auf dem neue Funktionen, Schnittstellen und Optimierungen kontinuierlich aufgebaut werden.
Das Ziel ist es, RovLink zu einer vollständig integrierten, intelligenten und erweiterbaren Plattform zu entwickeln, die Forschung, Entwicklung und Praxis gleichermaßen unterstützt.
Zukünftige Schwerpunkte
Die kommenden Versionen werden sich auf drei zentrale Entwicklungsbereiche konzentrieren:
-
Erweiterte KI-Integration: Die künstliche Intelligenz soll komplexere Entscheidungen treffen können, etwa durch Mustererkennung, adaptive Lernverfahren und die Integration zusätzlicher Umweltsensoren.
-
Optimierte Benutzeroberfläche: Die Oberfläche wird weiter verbessert, um eine noch intuitivere Steuerung zu ermöglichen. Dazu gehören anpassbare Layouts, erweiterte Visualisierungen und die Integration eines 3D-Ansichtsmodus.
-
Tiefere Hardware-Integration: In Zukunft soll RovLink eng mit realer Rover-Hardware kommunizieren, um Daten aus echten Sensoren in Echtzeit zu verarbeiten. Die bestehende Simulation kann dadurch nahtlos mit physischer Hardware verbunden werden.
Geplante Funktionen
Derzeit sind folgende Erweiterungen und Funktionen für RovLink geplant:
-
Anbindung an Online-KI-Systeme wie ChatGPT oder Claude zur erweiterten Analyse und Entscheidungsunterstützung
-
Unterstützung für lokale KI-Modelle, um Autonomie vollständig offline nutzbar zu machen
-
Erweiterte Kartenfunktionen mit 3D-Visualisierung und topografischen Daten
-
Intelligente Routenplanung mit Hinderniserkennung und adaptiver Navigation
-
Automatische Missionsberichte nach jeder Erkundung
-
Verbesserte Hardware-Überwachung in Echtzeit mit Systemdiagnosen
-
Cloud-Optionen für Datenspeicherung und Missionsanalyse (optional und deaktivierbar)
Zusammenarbeit und Community
RovLink ist ein offenes Projekt, das von Feedback, Ideen und Beiträgen der Community lebt. Jeder, der Anregungen oder Vorschläge zu neuen Funktionen, Sensoren, Visualisierungen oder Steuerungsmethoden hat, kann diese einbringen.
Das gemeinsame Ziel ist, RovLink zu einem System zu machen, das sich kontinuierlich weiterentwickelt und mit den Anforderungen seiner Nutzer wächst.
Langfristige Vision
Langfristig soll RovLink weit mehr sein als nur ein Rover-Dashboard. Es soll zu einer plattformübergreifenden Entwicklungsumgebung für Robotik werden, die Simulation, Steuerung, KI und Analyse in einem einzigen, vollständig anpassbaren System vereint.
Von Prototypen und Testfahrzeugen bis hin zu Forschungsexperimenten und Feldrobotern bietet RovLink damit eine Basis, auf der sich jede Art von Roverprojekt entwickeln und betreiben lässt. RovLink steht am Anfang einer spannenden technischen Entwicklung.
Schritt für Schritt entsteht eine leistungsstarke, flexible und intelligente Plattform, geschaffen für alle, die Robotik nicht nur nutzen, sondern aktiv gestalten wollen.

